Preliminary Report Highway: HWY18MH010

Uber had equipped the test vehicle with a developmental self-driving
system. The system consisted of forward- and side-facing cameras,
radars, LIDAR, navigation sensors, and a computing and data storage unit
integrated into the vehicle.[1] Uber had also equipped the vehicle
with an aftermarket camera system that was mounted in the windshield and
rear window and that provided additional front and rear videos, along
with an inward-facing view of the vehicle operator. In total, 10 camera
views were recorded over the course of the entire trip.
Executive Summary
The information in this report is preliminary and will be supplemented or corrected during the course of the investigation.
About 9:58 p.m., on Sunday, March 18, 2018,
an Uber Technologies, Inc. test vehicle, based on a modified 2017 Volvo
XC90 and operating with a self-driving system in computer control mode,
struck a pedestrian on northbound Mill Avenue, in Tempe, Maricopa
County, Arizona. The Uber test vehicle was occupied by one vehicle
operator, a 44-year-old female. No passengers were in the vehicle.
In the area of the crash, northbound Mill
Avenue consists of two left-turn lanes, two through lanes, and one bike
lane. The crash occurred before the formation of a right-turn lane.
Roadway lighting was present. The posted speed limit was 45 mph.
The crash occurred as the pedestrian, a
49-year-old female, walked a bicycle east across Mill Avenue. The Uber
test vehicle was traveling in the right through lane when its right
front side struck the pedestrian (see figure 1). As a result of the
crash, the pedestrian died. The vehicle operator was not injured.
In this area, northbound Mill Avenue is
separated from southbound Mill Avenue by a center median containing
trees, shrubs, and brick landscaping in the shape of an X. Four signs at
the edges of the brick median, facing toward the roadway, warn
pedestrians to use the crosswalk. The nearest crosswalk is at the
intersection of Mill Avenue and Curry Road, about 360 feet north of
where the crash occurred.
Figure 1. (Left)
Location of the crash on northbound Mill Avenue, showing the paths of
the pedestrian in orange and of the Uber test vehicle in green. (Right)
Postcrash view of the Uber test vehicle, showing damage to the right
front side.
The self-driving system relies on an
underlying map that establishes speed limits and permissible lanes of
travel. The system has two distinct control modes: computer control and
manual control. The operator can engage computer control by first
enabling, then engaging the system in a sequence similar to activating
cruise control. The operator can transition from computer control to
manual control by providing input to the steering wheel, brake pedal,
accelerator pedal, a disengage button, or a disable button.
The vehicle was factory equipped with several
advanced driver assistance functions by Volvo Cars, the original
manufacturer. The systems included a collision avoidance function with
automatic emergency braking, known as City Safety, as well as functions
for detecting driver alertness and road sign information. All these
Volvo functions are disabled when the test vehicle is operated in
computer control but are operational when the vehicle is operated in
manual control.
According to Uber, the developmental
self-driving system relies on an attentive operator to intervene if the
system fails to perform appropriately during testing. In addition, the
operator is responsible for monitoring diagnostic messages that appear
on an interface in the center stack of the vehicle dash and tagging
events of interest for subsequent review.
On the night of the crash, the operator
departed Uber’s garage with the vehicle at 9:14 p.m. to run an
established test route. At the time of the crash, the vehicle was
traveling on its second loop of the test route and had been in computer
control since 9:39 p.m. (i.e., for the preceding 19 minutes).
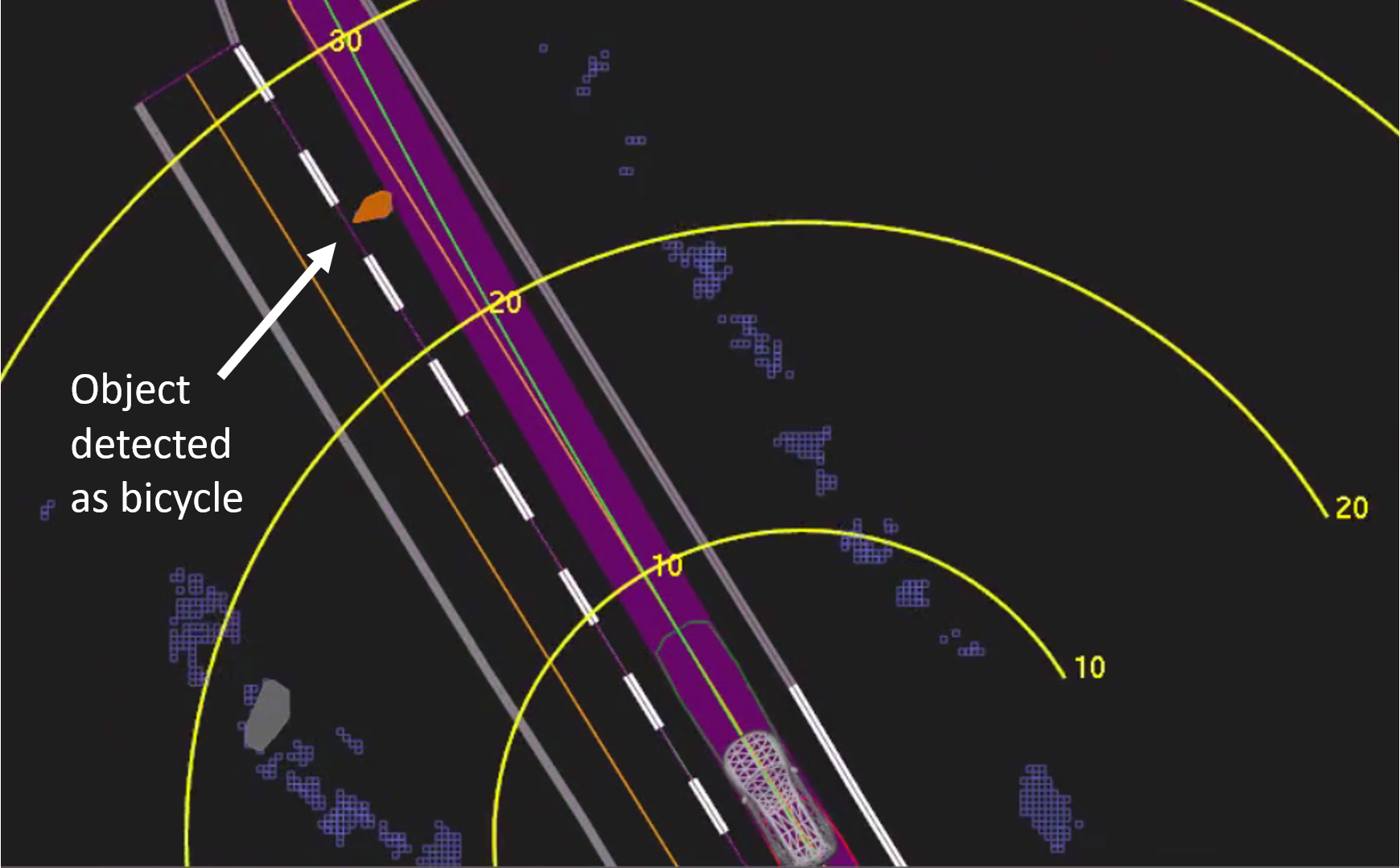
According to data obtained from the
self-driving system, the system first registered radar and LIDAR
observations of the pedestrian about 6 seconds before impact, when the
vehicle was traveling at 43 mph. As the vehicle and pedestrian paths
converged, the self-driving system software classified the pedestrian as
an unknown object, as a vehicle, and then as a bicycle with varying
expectations of future travel path. At 1.3 seconds before impact, the
self-driving system determined that an emergency braking maneuver was
needed to mitigate a collision (see figure 2).[2] According to Uber,
emergency braking maneuvers are not enabled while the vehicle is under
computer control, to reduce the potential for erratic vehicle behavior.
The vehicle operator is relied on to intervene and take action. The
system is not designed to alert the operator.
Figure 2. View of the self-driving system
data playback at about 1.3 seconds before impact, when the system
determined an emergency braking maneuver would be needed to mitigate a
collision. Yellow bands are shown in meters ahead. Orange lines show the
center of mapped travel lanes. The purple shaded area shows the path
the vehicle traveled, with the green line showing the center of that
path.
The self-driving system data showed that the
vehicle operator intervened less than a second before impact by engaging
the steering wheel. The vehicle speed at impact was 39 mph. The
operator began braking less than a second after the impact. The data
also showed that all aspects of the self-driving system were operating
normally at the time of the crash, and that there were no faults or
diagnostic messages.
Several Uber self-driving system cameras
captured the crash event. The videos were reviewed by the NTSB and the
parties to the investigation. The forward-facing videos show the
pedestrian coming into view and proceeding into the path of the vehicle.
The videos also show that the pedestrian, once visible, did not look in
the direction of the vehicle until just before impact. The videos show
that the pedestrian was dressed in dark clothing and that the bicycle
did not have any side reflectors. The bicycle had front and rear
reflectors and a forward headlamp, but all were facing in directions
perpendicular to the path of the oncoming vehicle. The videos show that
the pedestrian crossed in a section of roadway not directly illuminated
by the roadway lighting.
The inward-facing video shows the vehicle
operator glancing down toward the center of the vehicle several times
before the crash. In a postcrash interview with NTSB investigators, the
vehicle operator stated that she had been monitoring the self-driving
system interface. The operator further stated that although her personal
and business phones were in the vehicle, neither was in use until after
the crash, when she called 911.
The NTSB continues to gather information on
the Uber self-driving system, the vehicle interface, and the driver’s
personal and business cell phones. Although toxicological specimens were
not collected from the vehicle operator, responding officers from the
Tempe Police Department stated that the vehicle operator showed no signs
of impairment at the time of the crash.
The NTSB continues to gather information on
the pedestrian and is seeking information from anyone who might be aware
of her activities before the crash. Those with information should
contact the NTSB by email at witness@ntsb.gov. Toxicology test results
for the pedestrian were positive for methamphetamine and marijuana.
All aspects of the crash remain under
investigation as the NTSB determines the probable cause, with the intent
of issuing safety recommendations to prevent similar crashes. The NTSB
is working with the parties to the investigation—Uber, Volvo Cars, and
the Arizona Department of Transportation—to compile a complete and
accurate account of the crash.
1. Light Detection and Ranging (LIDAR) works
much like radar, but instead of radio waves, it emits pulses of infrared
light and measures how long they take to return after hitting nearby
objects. Navigation sensors monitor global positioning system (GPS),
inertia, and wheel speed.
2. In Uber’s self-driving system, an
emergency brake maneuver refers to a deceleration greater than 6.5
meters per second squared (m/s2).
Probable Cause
The information in this report is preliminary and will be supplemented or corrected during the course of the investigation.